Attachments
This alternative main program was not used in the final implementation of the robot but made use of the IMU to maintain robot heading when not tracking a line. The alternative software is outlined below:
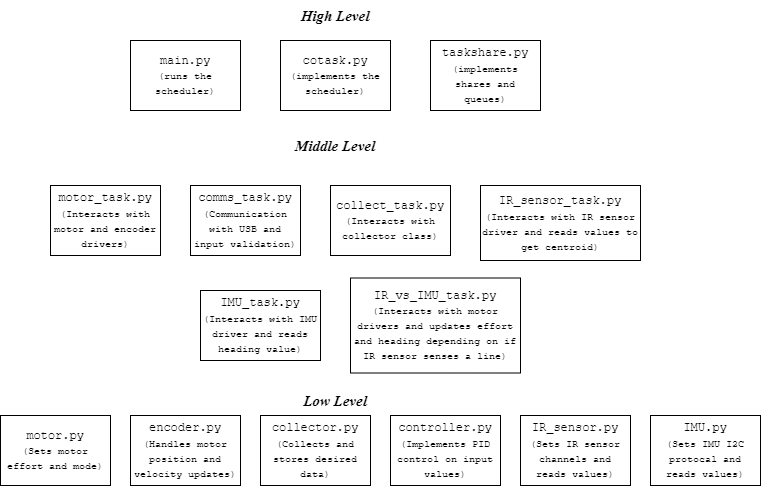
Hierarchy
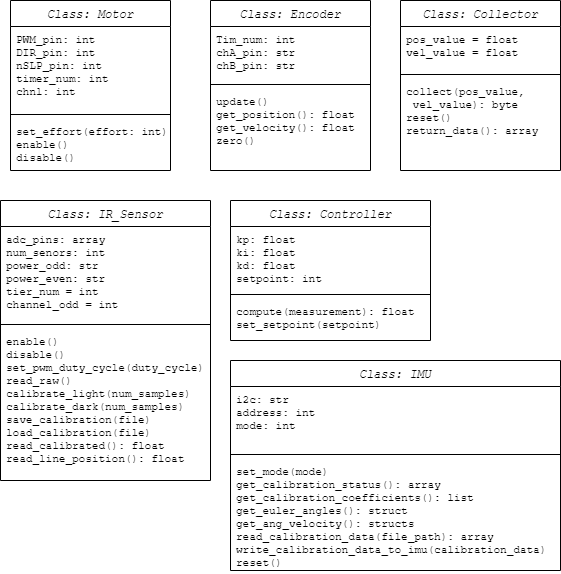
Class Diagram
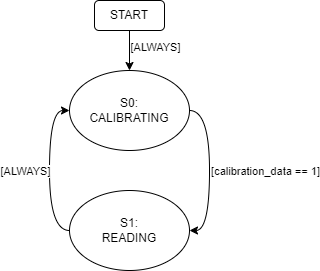
IMU Sensor FSM